mirror of
https://mirrors.bfsu.edu.cn/git/linux.git
synced 2024-11-20 10:44:23 +08:00
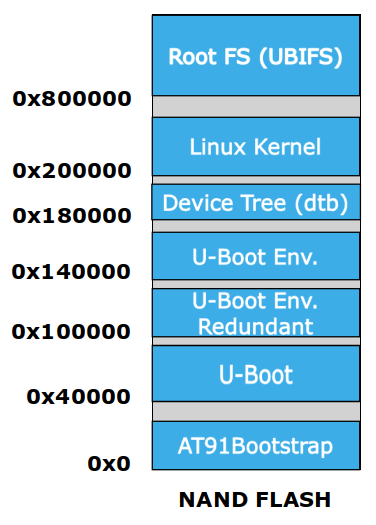
sama5d4_xplained, ssam9x5cm, sama5d2_ptc_ek and sama5d3_xplained nand flashes have a common memory map. Even the nand memory partitions to match our NAND flash map available at: http://www.at91.com/linux4sam/pub/Linux4SAM/SambaSubsections//demo_nandflash_map_lnx4sam5x.png Signed-off-by: Tudor Ambarus <tudor.ambarus@microchip.com> Signed-off-by: Ludovic Desroches <ludovic.desroches@microchip.com>
{kind=link}
318 lines
7.3 KiB
Plaintext
318 lines
7.3 KiB
Plaintext
/*
|
|
* at91-sama5d4_xplained.dts - Device Tree file for SAMA5D4 Xplained board
|
|
*
|
|
* Copyright (C) 2015 Atmel,
|
|
* 2015 Josh Wu <josh.wu@atmel.com>
|
|
*
|
|
* This file is dual-licensed: you can use it either under the terms
|
|
* of the GPL or the X11 license, at your option. Note that this dual
|
|
* licensing only applies to this file, and not this project as a
|
|
* whole.
|
|
*
|
|
* a) This file is free software; you can redistribute it and/or
|
|
* modify it under the terms of the GNU General Public License as
|
|
* published by the Free Software Foundation; either version 2 of the
|
|
* License, or (at your option) any later version.
|
|
*
|
|
* This file is distributed in the hope that it will be useful,
|
|
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
|
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
|
* GNU General Public License for more details.
|
|
*
|
|
* Or, alternatively,
|
|
*
|
|
* b) Permission is hereby granted, free of charge, to any person
|
|
* obtaining a copy of this software and associated documentation
|
|
* files (the "Software"), to deal in the Software without
|
|
* restriction, including without limitation the rights to use,
|
|
* copy, modify, merge, publish, distribute, sublicense, and/or
|
|
* sell copies of the Software, and to permit persons to whom the
|
|
* Software is furnished to do so, subject to the following
|
|
* conditions:
|
|
*
|
|
* The above copyright notice and this permission notice shall be
|
|
* included in all copies or substantial portions of the Software.
|
|
*
|
|
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND,
|
|
* EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES
|
|
* OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND
|
|
* NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT
|
|
* HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY,
|
|
* WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING
|
|
* FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR
|
|
* OTHER DEALINGS IN THE SOFTWARE.
|
|
*/
|
|
/dts-v1/;
|
|
#include "sama5d4.dtsi"
|
|
|
|
/ {
|
|
model = "Atmel SAMA5D4 Xplained";
|
|
compatible = "atmel,sama5d4-xplained", "atmel,sama5d4", "atmel,sama5";
|
|
|
|
chosen {
|
|
stdout-path = "serial0:115200n8";
|
|
};
|
|
|
|
memory {
|
|
reg = <0x20000000 0x20000000>;
|
|
};
|
|
|
|
clocks {
|
|
slow_xtal {
|
|
clock-frequency = <32768>;
|
|
};
|
|
|
|
main_xtal {
|
|
clock-frequency = <12000000>;
|
|
};
|
|
};
|
|
|
|
ahb {
|
|
apb {
|
|
uart0: serial@f8004000 {
|
|
atmel,use-dma-rx;
|
|
atmel,use-dma-tx;
|
|
status = "okay";
|
|
};
|
|
|
|
spi0: spi@f8010000 {
|
|
cs-gpios = <&pioC 3 0>, <0>, <0>, <0>;
|
|
status = "okay";
|
|
m25p80@0 {
|
|
compatible = "atmel,at25df321a";
|
|
spi-max-frequency = <50000000>;
|
|
reg = <0>;
|
|
};
|
|
};
|
|
|
|
i2c0: i2c@f8014000 {
|
|
status = "okay";
|
|
};
|
|
|
|
macb0: ethernet@f8020000 {
|
|
phy-mode = "rmii";
|
|
status = "okay";
|
|
pinctrl-names = "default";
|
|
pinctrl-0 = <&pinctrl_macb0_rmii &pinctrl_macb0_phy_irq>;
|
|
|
|
phy0: ethernet-phy@1 {
|
|
interrupt-parent = <&pioE>;
|
|
interrupts = <1 IRQ_TYPE_LEVEL_LOW>;
|
|
reg = <1>;
|
|
};
|
|
};
|
|
|
|
mmc1: mmc@fc000000 {
|
|
pinctrl-names = "default";
|
|
pinctrl-0 = <&pinctrl_mmc1_clk_cmd_dat0 &pinctrl_mmc1_dat1_3 &pinctrl_mmc1_cd>;
|
|
vmmc-supply = <&vcc_mmc1_reg>;
|
|
vqmmc-supply = <&vcc_3v3_reg>;
|
|
status = "okay";
|
|
slot@0 {
|
|
reg = <0>;
|
|
bus-width = <4>;
|
|
cd-gpios = <&pioE 3 0>;
|
|
};
|
|
};
|
|
|
|
usart3: serial@fc00c000 {
|
|
atmel,use-dma-rx;
|
|
atmel,use-dma-tx;
|
|
status = "okay";
|
|
};
|
|
|
|
usart4: serial@fc010000 {
|
|
status = "okay";
|
|
};
|
|
|
|
spi1: spi@fc018000 {
|
|
cs-gpios = <&pioB 21 0>;
|
|
status = "okay";
|
|
};
|
|
|
|
tcb2: timer@fc024000 {
|
|
timer0: timer@0 {
|
|
compatible = "atmel,tcb-timer";
|
|
reg = <0>;
|
|
};
|
|
|
|
timer1: timer@1 {
|
|
compatible = "atmel,tcb-timer";
|
|
reg = <1>;
|
|
};
|
|
};
|
|
|
|
adc0: adc@fc034000 {
|
|
pinctrl-names = "default";
|
|
pinctrl-0 = <
|
|
/* external trigger conflicts with USBA_VBUS */
|
|
&pinctrl_adc0_ad0
|
|
&pinctrl_adc0_ad1
|
|
&pinctrl_adc0_ad2
|
|
&pinctrl_adc0_ad3
|
|
&pinctrl_adc0_ad4
|
|
>;
|
|
atmel,adc-vref = <3300>;
|
|
status = "okay";
|
|
};
|
|
|
|
watchdog@fc068640 {
|
|
status = "okay";
|
|
};
|
|
|
|
pinctrl@fc06a000 {
|
|
board {
|
|
pinctrl_mmc1_cd: mmc1_cd {
|
|
atmel,pins =
|
|
<AT91_PIOE 3 AT91_PERIPH_GPIO AT91_PINCTRL_PULL_UP_DEGLITCH>;
|
|
};
|
|
pinctrl_usba_vbus: usba_vbus {
|
|
atmel,pins =
|
|
<AT91_PIOE 31 AT91_PERIPH_GPIO AT91_PINCTRL_DEGLITCH>;
|
|
};
|
|
pinctrl_key_gpio: key_gpio_0 {
|
|
atmel,pins =
|
|
<AT91_PIOE 8 AT91_PERIPH_GPIO AT91_PINCTRL_PULL_UP_DEGLITCH>;
|
|
};
|
|
pinctrl_macb0_phy_irq: macb0_phy_irq_0 {
|
|
atmel,pins =
|
|
<AT91_PIOE 1 AT91_PERIPH_GPIO AT91_PINCTRL_PULL_UP_DEGLITCH>;
|
|
};
|
|
};
|
|
};
|
|
};
|
|
|
|
usb0: gadget@400000 {
|
|
atmel,vbus-gpio = <&pioE 31 GPIO_ACTIVE_HIGH>;
|
|
pinctrl-names = "default";
|
|
pinctrl-0 = <&pinctrl_usba_vbus>;
|
|
status = "okay";
|
|
};
|
|
|
|
usb1: ohci@500000 {
|
|
num-ports = <3>;
|
|
atmel,vbus-gpio = <0
|
|
&pioE 11 GPIO_ACTIVE_HIGH
|
|
&pioE 14 GPIO_ACTIVE_HIGH
|
|
>;
|
|
status = "okay";
|
|
};
|
|
|
|
usb2: ehci@600000 {
|
|
status = "okay";
|
|
};
|
|
|
|
ebi: ebi@10000000 {
|
|
pinctrl-0 = <&pinctrl_ebi_cs3 &pinctrl_ebi_nrd_nandoe
|
|
&pinctrl_ebi_nwe_nandwe &pinctrl_ebi_nandrdy
|
|
&pinctrl_ebi_data_0_7 &pinctrl_ebi_nand_addr>;
|
|
pinctrl-names = "default";
|
|
status = "okay";
|
|
|
|
nand_controller: nand-controller {
|
|
status = "okay";
|
|
|
|
nand@3 {
|
|
reg = <0x3 0x0 0x2>;
|
|
atmel,rb = <0>;
|
|
nand-bus-width = <8>;
|
|
nand-ecc-mode = "hw";
|
|
nand-on-flash-bbt;
|
|
label = "atmel_nand";
|
|
|
|
partitions {
|
|
compatible = "fixed-partitions";
|
|
#address-cells = <1>;
|
|
#size-cells = <1>;
|
|
|
|
at91bootstrap@0 {
|
|
label = "at91bootstrap";
|
|
reg = <0x0 0x40000>;
|
|
};
|
|
|
|
bootloader@40000 {
|
|
label = "bootloader";
|
|
reg = <0x40000 0xc0000>;
|
|
};
|
|
|
|
bootloaderenvred@100000 {
|
|
label = "bootloader env redundant";
|
|
reg = <0x100000 0x40000>;
|
|
};
|
|
|
|
bootloaderenv@140000 {
|
|
label = "bootloader env";
|
|
reg = <0x140000 0x40000>;
|
|
};
|
|
|
|
dtb@180000 {
|
|
label = "device tree";
|
|
reg = <0x180000 0x80000>;
|
|
};
|
|
|
|
kernel@200000 {
|
|
label = "kernel";
|
|
reg = <0x200000 0x600000>;
|
|
};
|
|
|
|
rootfs@800000 {
|
|
label = "rootfs";
|
|
reg = <0x800000 0x1f800000>;
|
|
};
|
|
};
|
|
};
|
|
};
|
|
};
|
|
};
|
|
|
|
gpio_keys {
|
|
compatible = "gpio-keys";
|
|
|
|
pinctrl-names = "default";
|
|
pinctrl-0 = <&pinctrl_key_gpio>;
|
|
|
|
pb_user1 {
|
|
label = "pb_user1";
|
|
gpios = <&pioE 8 GPIO_ACTIVE_HIGH>;
|
|
linux,code = <0x100>;
|
|
wakeup-source;
|
|
};
|
|
};
|
|
|
|
leds {
|
|
compatible = "gpio-leds";
|
|
status = "okay";
|
|
|
|
d8 {
|
|
label = "d8";
|
|
gpios = <&pioD 30 GPIO_ACTIVE_HIGH>;
|
|
default-state = "on";
|
|
};
|
|
|
|
d10 {
|
|
label = "d10";
|
|
gpios = <&pioE 15 GPIO_ACTIVE_LOW>;
|
|
linux,default-trigger = "heartbeat";
|
|
};
|
|
};
|
|
|
|
vcc_3v3_reg: fixedregulator_3v3 {
|
|
compatible = "regulator-fixed";
|
|
regulator-name = "VCC 3V3";
|
|
regulator-min-microvolt = <3300000>;
|
|
regulator-max-microvolt = <3300000>;
|
|
regulator-boot-on;
|
|
regulator-always-on;
|
|
};
|
|
|
|
vcc_mmc1_reg: fixedregulator_mmc1 {
|
|
compatible = "regulator-fixed";
|
|
gpio = <&pioE 4 GPIO_ACTIVE_LOW>;
|
|
regulator-name = "VDD MCI1";
|
|
regulator-min-microvolt = <3300000>;
|
|
regulator-max-microvolt = <3300000>;
|
|
vin-supply = <&vcc_3v3_reg>;
|
|
regulator-always-on;
|
|
};
|
|
};
|